

En este tutorial vamos a aprender a crear un bot de telegram usando Python y el bot API.
El bot API es una interfaz basada en HTTP creada para los desarrolladores interesados en crear bots para Telegram.
Para comenzar debemos crear un bot de telegram usando el bot padre (o conocido por su alias @botfather) que es quien crea los bots, administra los tókenes, los alias y permisos. Los pasos se muestran a continuación.
Abrimos la aplicación de Telegram y buscamos @botfather.


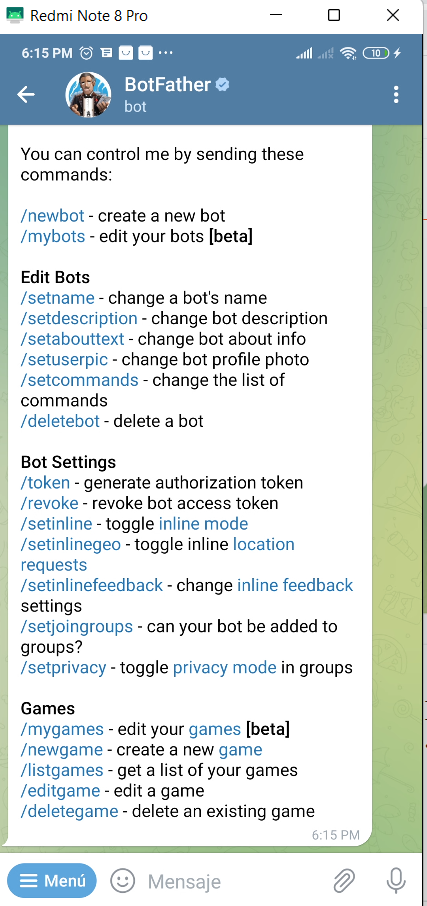
Presionamos INICIAR y enviamos el mensaje /help para ver todos los comando disponibles.
2. Crear el bot
Para crear un nuevo bot, enviamos el mensaje /newbot. El botfather solicitarà un nombre para el nuevo bot. El nombre debe ser único y terminar con la palabra "_bot", por ejemplo Mirobot11_bot. Adicionalmente será necesario un nombre de usuario para nuestro bot, puede ser el mismo nombre.

Una vez creado el bot, el botfather mostrará información de acceso como es el URL y el TOKEN que se necesita para acceder al bot a través del API

Para verificar que el bot está funcionando, ingresamos en el navegador la url https://api.telegram.org/bot<TOKEN>/getUpdates (reemplace <TOKEN> por su token) y obtendremos el siguiente resultado:

3. Crear el código en Python
Instalamos Python 3 en nuestro dispositivo. Si no sabes como hacerlo pulsa aquí. Creamos un script con el siguiente código y lo guardamos con el nombre telegram.py:
Creamos otro script con el siguiente código y lo guardamos con el nombre de utelegram.py en el mismo directorio donde se guardò el script anterior.
Ejecutamos el script telegram.py y esperamos a que se conecte al bot. Si no existe ningún problema se imprimirá el mensaje BOT LISTENING y el bot empezará a escuchar los mensajes.

4. Probar el bot
Para enviar un mensaje al bot, lo buscamos en la app de telegram o accedemos al URL de acceso al mismo https://telegram.me/mirobot11_bot y presionamos INICIAR (se puede iniciar el bot enviando el comando /start)








